ROS 불러오기
launch에서 ROS bridge 선택
Isaac sim Example, ROS, Navigation
예외
alias dohumble='source /opt/ros/humble/setup.bash; source ~/IsaacSim_ros_workspaces/humble_ws/install/local_setup.bash; echo Activate humble!'
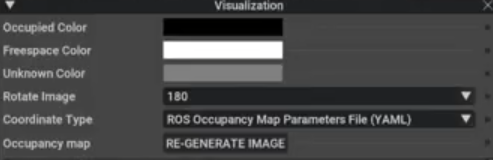
occupancy Map

camera, top
warehouse_with_forkfits
boundry selection, caculation, visualize Image
occpy:점유하다.
ROS O
isaacSim-ros_workpaces, navigation, carter,
For Navigation
sudo apt install ros-humble-navigation2 ros-humble-nav2-bringup ros-humble-turtlebot3*sudo apt install ros-humble-vision-msgssudo apt install ros-humble-pointcloud-to-laserscan
For rosdep install command
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essentialFor colcon build command
sudo apt install python3-colcon-common-extensionscolcon buildGit Clone & Build
git clone https://github.com/NVIDIA-Omniverse/IsaacSim-ros_workspaces.gitcd ~/IsaacSim-ros_workspaces/humble_wsrosdep install -i --from-path src --rosdistro humble -ySourcing
gedit ~/.bashrcecho "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrcsource ~/IsaacSim-ros_workspaces/humble_ws/install/local_setup.bashexport RMW_IMPLEMENTATION=rmw_fastrtps_cppexport FASTRTPS_DEFAULT_PROFILES_FILE=~/IsaacSim-ros_workspaces/humble_ws/fastdds.xmlRun
source ~/.bashrc
ros2 launch carter_navigation carter_navigation.launch.py

RTX - Interactive (Path Tracing): 이것은 NVIDIA RTX 기술을 사용한 인터랙티브 패스 트레이싱 렌더링 모드를 나타냅니다.
Rendering Settings: 렌더링 설정 관련 옵션입니다.
Rendering Mode: 렌더링 모드를 선택하는 옵션입니다.
-
- Default: 기본 렌더링 모드입니다.
- Wireframe: 오브젝트를 선만으로 구성된 와이어프레임으로 표시하는 모드입니다.
- Debug View: 디버깅을 위한 뷰 옵션을 제공합니다.
- Camera Light: 카메라 라이트를 사용하거나 사용하지 않을 것인지를 설정합니다.
- Disable Materials (White Mode): 모든 재질을 비활성화하고 오브젝트를 흰색 모드로 표시합니다.
- Preferences: 선호하는 설정을 조정하는 부분입니다.
더보기
- RTX - Interactive (Path Tracing): 이것은 NVIDIA RTX 기술을 사용한 인터랙티브 패스 트레이싱 렌더링 모드를 나타냅니다. 패스 트레이싱은 빛의 경로를 시뮬레이션하여 현실적인 이미지를 생성하는 렌더링 기술입니다.
- Rendering Settings: 렌더링 설정 관련 옵션입니다.
- Load from Preset: 사전 설정된 렌더링 설정을 불러올 수 있는 옵션입니다.
- Save Current as Preset: 현재의 렌더링 설정을 사전 설정으로 저장하는 기능입니다.
- Reset to Defaults: 렌더링 설정을 기본값으로 재설정합니다.
- Rendering Mode: 렌더링 모드를 선택하는 옵션입니다.
- Default: 기본 렌더링 모드입니다.
- Wireframe: 오브젝트를 선만으로 구성된 와이어프레임으로 표시하는 모드입니다.
- Debug View: 디버깅을 위한 뷰 옵션을 제공합니다.
- Camera Light: 카메라 라이트를 사용하거나 사용하지 않을 것인지를 설정합니다.
- Disable Materials (White Mode): 모든 재질을 비활성화하고 오브젝트를 흰색 모드로 표시합니다.
- Preferences: 선호하는 설정을 조정하는 부분입니다.
sudo apt updatesudo apt clean'2024 > [8] 자율주행 항만 로봇' 카테고리의 다른 글
| isaacsim (0) | 2024.05.05 |
|---|---|
| Nav 오류 해결 (0) | 2024.05.04 |
| alias dohumble (0) | 2024.05.04 |
| 영상 요약 사이트 (0) | 2024.05.03 |
| 윈도우 재부팅 (1) | 2024.05.02 |

