ROS & ROS 2 설치


https://ms-iot.github.io/ROSOnWindows/GettingStarted/SetupRos2.html
ROS 2 Binary Installation - ROS on Windows
ROS 2 on Windows Setup Windows Operating System ROS for Windows requires 64-bit Windows 10 Desktop or Windows 10 IoT Enterprise. Please ensure that you have Powershell installed and in the system path. Exclude c:\opt (and later your workspace folder) fro
ms-iot.github.io
https://learn.microsoft.com/en-us/visualstudio/ide/reference/command-prompt-powershell?view=vs-2022
Command-line shells & prompt for developers - Visual Studio (Windows)
Start from the Tools > Command Line menu. Select the Visual Studio Developer Command Prompt, Developer PowerShell, or terminal to use .NET and C++ tools more easily.
learn.microsoft.com
네이티브 ROS 설치
https://ms-iot.github.io/ROSOnWindows/GettingStarted/SetupRos2.html

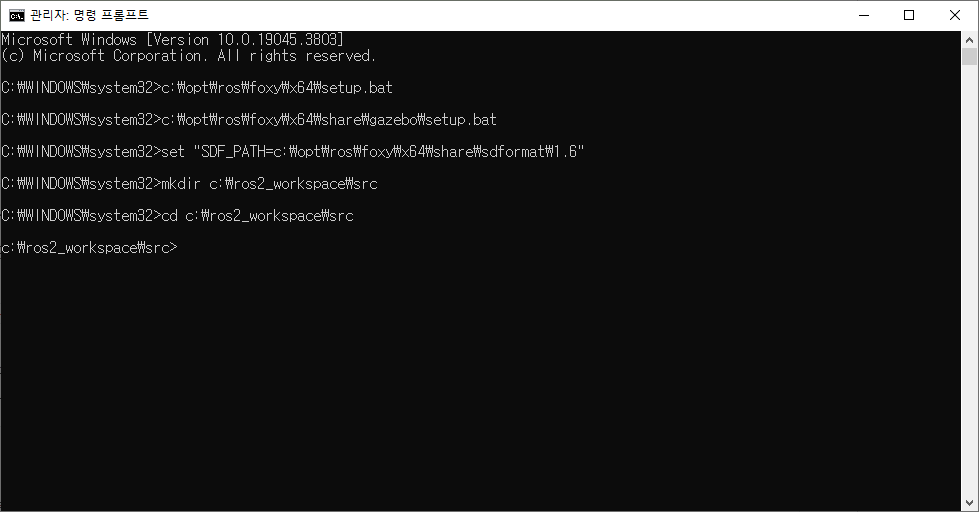
: : activate the ROS 2 environment


:: activate the Gazebo simulation environment




























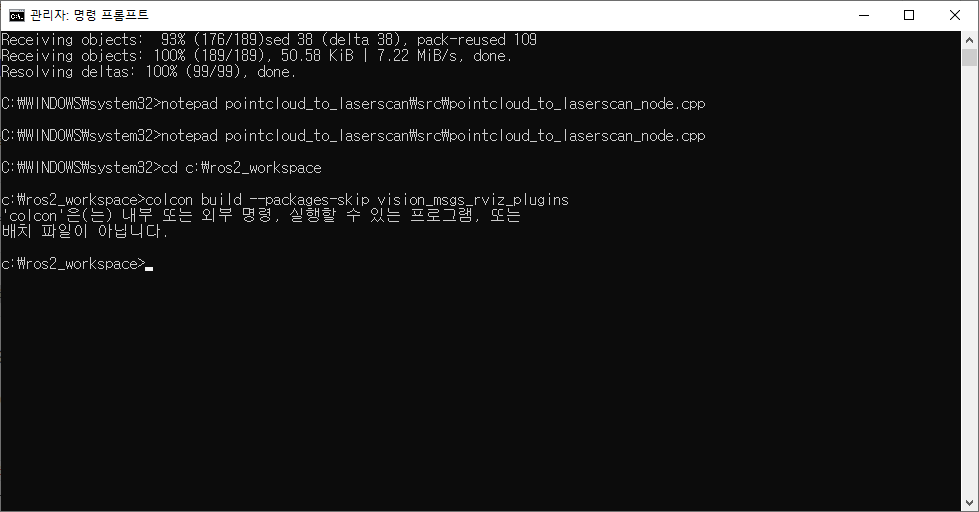
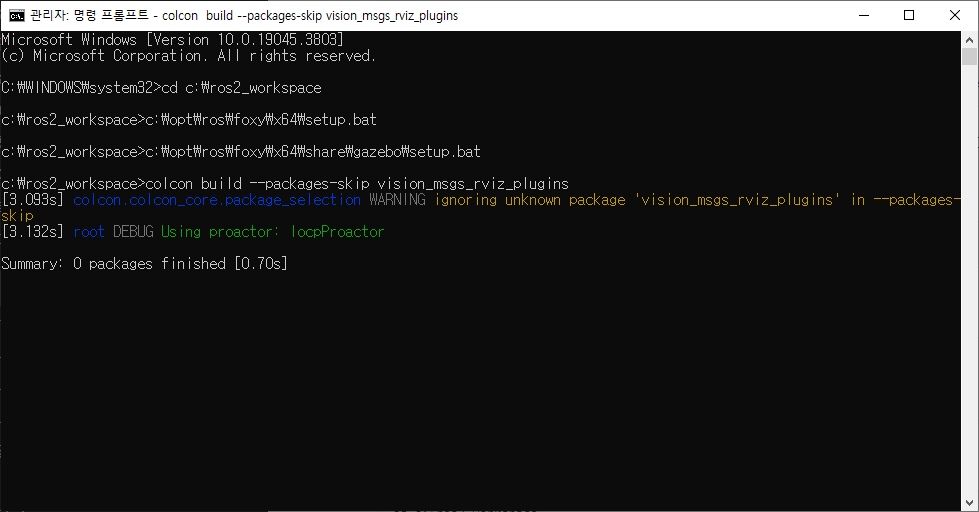
오류


c:\opt\ros\foxy\x64\setup.bat
c:\opt\ros\foxy\x64\share\gazebo\setup.bat
C:\opt\ros\humble\x64\setup.bat
C:\humble_ws\install\setup.bat

배치파일 만드는 법이랑 경로만 붙여넣는 법 찾아보겠습니다.
오류 메시지에 따르면, 환경 변수 CMAKE_PREFIX_PATH에 지정된 경로 'C:\opt\ros\foxy\x64\tools\vcpkg\installed\x64-windows'가 실제로 존재하지 않습니다.
이는 CMake가 프로젝트를 구성할 때 찾아야 하는 프리픽스 경로 중 하나가 실제 파일 시스템에 존재하지 않는다는 것을 의미합니다. 이 문제를 해결하기 위해서는 다음의 단계를 따라야 합니다:
- 경로 확인: 해당 경로가 실제로 존재하는지 파일 탐색기를 사용하여 직접 확인해보세요.
- ROS 설치 확인: ROS Foxy가 올바르게 설치되어 있고, vcpkg 도구가 해당 경로에 설치되어 있는지 확인하세요.
- 환경 변수 수정: 만약 경로가 잘못되었거나 변경되어야 한다면, 환경 변수 CMAKE_PREFIX_PATH를 올바른 경로로 수정해야 합니다. 환경 변수는 시스템 속성에서 '고급 시스템 설정' -> '환경 변수'를 통해 수정할 수 있습니다.
- 시스템 재시작: 환경 변수를 수정한 후에는 변경사항이 적용되도록 시스템을 재시작하는 것이 좋습니다.
- CMake 재실행: 이후 다시 CMake를 실행하여 프로젝트를 구성해보세요.
이러한 단계를 따라도 문제가 해결되지 않는 경우, ROS와 관련된 커뮤니티나 포럼에서 추가적인 지원을 요청하거나, ROS 설치를 다시 수행할 수도 있습니다.
ROS 브릿지 환경 설정하기
isaac-sim.sh에서 ROS Bridge 버전 선택
장애물 감지
포획된 ROS 패키지
Python3.10으로 ROS 2 작업 공간 구축
Docker 컨테이너에서 ROS 실행
ROS 튜토리얼
'2023 > isaac sim' 카테고리의 다른 글
| Ubuntu (Source) vs(Binary) (0) | 2024.01.16 |
|---|---|
| (Xavier) SDK 5.12/20.04 Nitro ROS (0) | 2024.01.16 |
| (window) humble #2 (0) | 2024.01.13 |
| (window) humble #1 (0) | 2023.12.26 |
| isaac sim 튜토리얼 (0) | 2023.12.24 |



