https://nvidia-isaac-ros.github.io/getting_started/hardware_setup/index.html
Hardware Setup — isaac_ros_docs documentation
© Copyright 2023, NVIDIA. Last updated on Dec 09, 2023.
nvidia-isaac-ros.github.io
로케일 설정
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings
종속성 설치
sudo apt update && sudo apt install gnupg wget
sudo apt install software-properties-common
sudo add-apt-repository universe
설정 소스
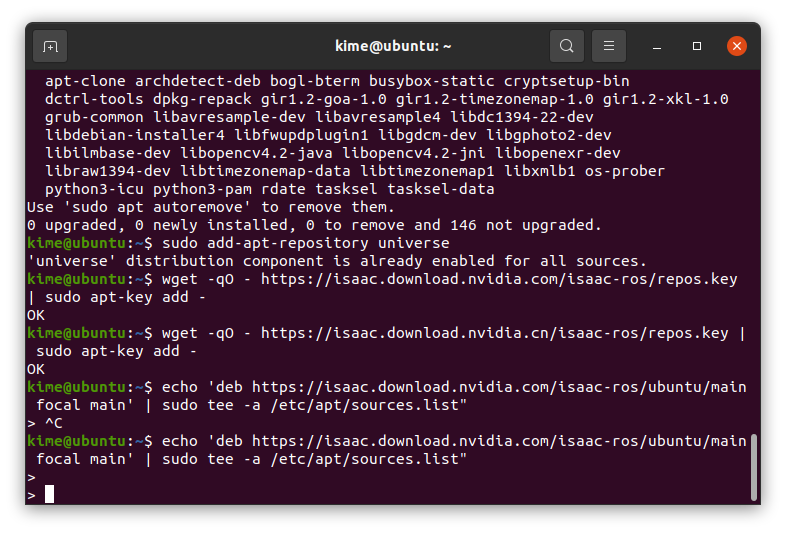
먼저 GPG 키를 에 등록하세요 apt. 아래에는 두 가지 옵션이 나열되어 있습니다. 하나는 .com(미국 CDN)이고 다른 하나는 .cn(중국 CDN)입니다. 원하는 것을 선택하세요.
wget -qO - https://isaac.download.nvidia.com/isaac-ros/repos.key | sudo apt-key add -
wget -qO - https://isaac.download.nvidia.cn/isaac-ros/repos.key | sudo apt-key add -
이제 소스에 저장소를 추가하세요 apt.
echo 'deb https://isaac.download.nvidia.com/isaac-ros/ubuntu/main focal main' | sudo tee -a /etc/apt/sources.listecho 'deb https://isaac.download.nvidia.cn/isaac-ros/ubuntu/main focal main' | sudo tee -a /etc/apt/sources.list다음으로, Buildfarm이 아닌 모든 ROS 2 패키지에 대해 ROS 2 apt 저장소가 있는지 확인하세요.
오류
함정 카드였음(해결완료)
sudo apt update && sudo apt install curl -y \
&& sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg오류_해결완료
sudo apt update && sudo apt install curl -y \
&& sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg다음으로, Buildfarm이 아닌 모든 ROS 2 패키지에 대해 ROS 2 apt 저장소가 있는지 확인하세요.
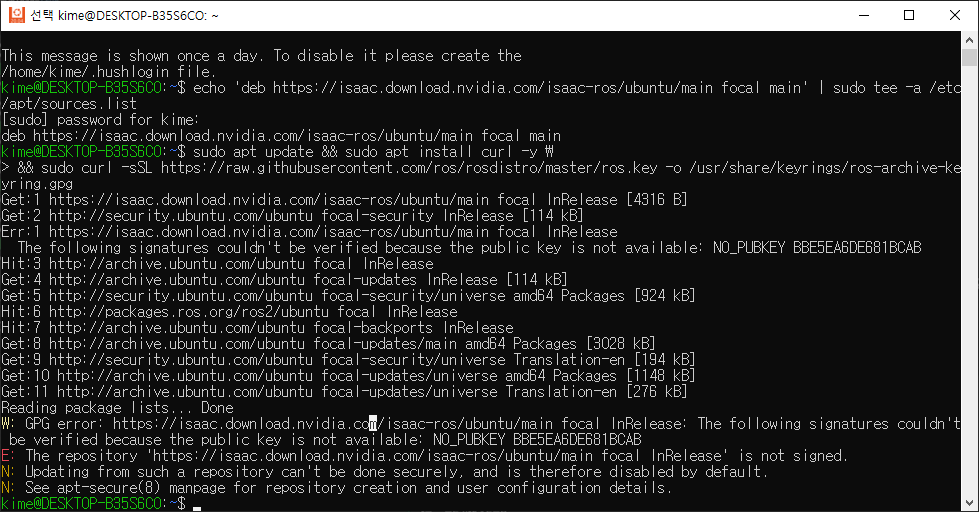
Err:1https://isaac.download.nvidia.com/isaac-ros/ubuntu/main focal InRelease
The following signatures couldn't be verified because the public key is not available: NO_PUBKEY BBE5EA6DE681BCAB
Hit:3 http://archive.ubuntu.com/ubuntu focal InRelease
Get:4 http://archive.ubuntu.com/ubuntu focal-updates InRelease [114 kB]
Get:5 http://security.ubuntu.com/ubuntu focal-security/universe amd64 Packages [924 kB]
Hit:6 http://packages.ros.org/ros2/ubuntu focal InRelease
Hit:7 http://archive.ubuntu.com/ubuntu focal-backports InRelease
Get:8 http://archive.ubuntu.com/ubuntu focal-updates/main amd64 Packages [3028 kB]
Get:9 http://security.ubuntu.com/ubuntu focal-security/universe Translation-en [194 kB]
Get:10 http://archive.ubuntu.com/ubuntu focal-updates/universe amd64 Packages [1148 kB]
Get:11 http://archive.ubuntu.com/ubuntu focal-updates/universe Translation-en [276 kB]
Reading package lists... Done
W: GPG error: https://isaac.download.nvidia.com/isaac-ros/ubuntu/main focal InRelease: The following signatures couldn't be verified because the public key is not available: NO_PUBKEY BBE5EA6DE681BCAB
E: The repository ' https://isaac.download.nvidia.com/isaac-ros/ubuntu/main focal InRelease' is not signed.
N: Updating from such a repository can't be done securely, and is therefore disabled by default.
N: See apt-secure(8) manpage for repository creation and user configuration details.
이 오류는 위의 오류 해결된 줄 알고 좋아했다가
키를 중국키로 해두고, 미국 레포리지만 달랑 써서 발생한 오류임
미국키 넣고, 미국 레포리지 쓰면 해결완료!
???
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/nullROS 2 패키지 설치
sudo apt update
sudo apt install ros-humble-desktop
# ROS-Base 설치(Bare Bones): 통신 라이브러리, 메시지 패키지, 명령줄 도구. GUI 도구가 없습니다.
# sudo apt install ros-humble-ros-base
# 개발 도구: ROS 패키지를 구축하기 위한 컴파일러 및 기타 도구
# sudo apt install ros-dev-tools
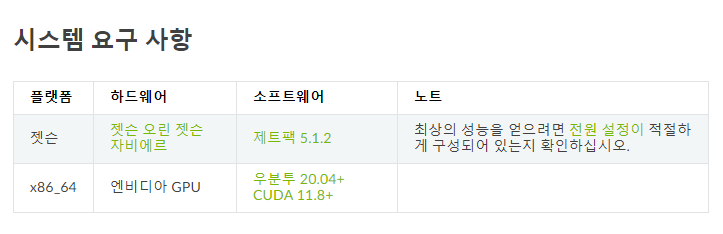
이런 요구사항이지만, 12.04/우분투 20.04니까 되겠지.

윈도우 11이네....아나...그래도 도전해봄
아래는 컨테이너를 해보자

NVIDIA 컨테이너 툴킷을 사용하는 것과 사용하지 않는 것 사이에는 몇 가지 주요 차이점이 있습니다:
- 성능: 툴킷을 사용하면 NVIDIA GPU의 전체 성능을 활용할 수 있어 GPU 가속 애플리케이션의 성능이 크게 향상됩니다. 반면, 툴킷을 사용하지 않으면 GPU 성능을 최대로 활용하기 어려워 성능 저하가 발생할 수 있습니다.
--> 1 epoch 계산 빨라짐 - 설정의 용이성: 툴킷을 사용하면 GPU를 사용하는 컨테이너 환경을 쉽게 설정할 수 있습니다. 반면에 툴킷 없이는 GPU와 컨테이너 환경을 수동으로 설정해야 하며, 이는 복잡하고 시간이 많이 소요될 수 있습니다.
- 호환성과 유연성: 툴킷을 사용하면 다양한 드라이버와 CUDA 버전에 대한 호환성이 보장되며, 이는 컨테이너화된 애플리케이션의 배포와 확장성을 향상시킵니다. 툴킷 없이는 이러한 호환성과 유연성을 확보하기 어렵습니다.
'2023 > isaac sim' 카테고리의 다른 글
| DDS와 RTPS의 차이 (0) | 2024.01.16 |
|---|---|
| Ubuntu (Source) vs(Binary) (0) | 2024.01.16 |
| (window) humble #2 (0) | 2024.01.13 |
| (window) humble #1 (0) | 2023.12.26 |
| (window) humble #0 (0) | 2023.12.26 |

