ISAAC SIM/BLENDER 실행
객체 불러오기
터틀봇 down
컨터이너 down
각각 다운로드

아이작심에 불러오기
file, import, 파일


객체 세우기
Tip)위의 사진처럼 어둡다면?

객체 선택, orient, -90

객체 크기 증가
객체, scale, 1000(단위는 m)


Tip) F키를 누르면, 화면에 가득차게 fix
객체 길이 측정



* 목적
객체를 조사하여 가로 세로 높이를 파악한다.
정확한 치수를 measure로 구현한다.
객체 질량설정
객체, +add, physics, Rigid body
+add, physics, mass



지면 설정
Tip) 바닥이 없으면 떨어짐

create, physics,ground/ camera, perspective

시점 설정
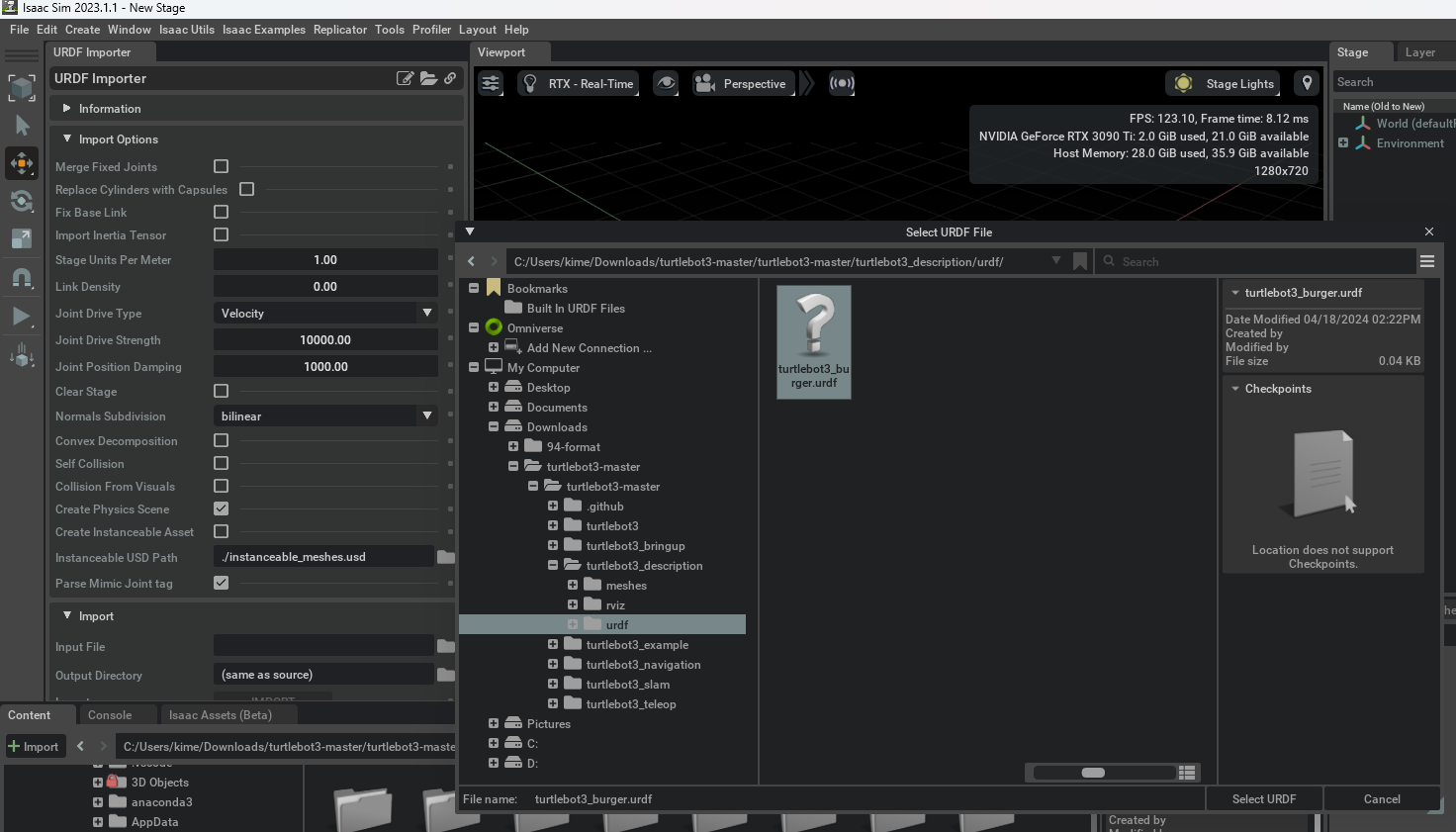
터틀봇 출력(동역학 타입 속도
isaac Utils, workflows, URDF Importer,
Fix Base Link 체크 해제,
Joint Drive Type, velocity
Importer, input File, 파일, import




tip) xacro 파일 urdf 파일로 바꾸는 법(쓸모없음 그냥 humble에서 다운받으셈)
더보기


cd /mnt/c/Users/kime/Downloads/turtlebot3-master/turtlebot3-master/turtlebot3_description/urdfros2 run xacro xacro turtlebot3_burger.urdf.xacro > turtlebot3_burger.urdf위에 실패 다시
더보기
mv /mnt/c/Users/kime/Downloads/turtlebot3-master /home/kime/ws_moveit2
마찰 감쇠 강성 조정
wheel_left_joint, Break Force, Break Torque

angular, max_force

turtlebot3_burger 오른쪽, create, physics, physics Material


- Rigid Body Material (경질체 재료)-플라스틱
- Deformable Body Material (변형 가능한 재료)-옷감
- PBD Particle Material (입자 기반 동역학 재료)-액체, 가스
정적 계수
동적 계수
반발 계수
밀도 조정

색깔 바꾸기

처음 시작
